当前
设计、验证、启动
1、工序变更时通过硬线构建的安全系统的设计、验证、启动投产准备时间长
2、各机器人的连接验证需要大量时间
运行
由于全球生产基地扩大,依靠现场专家来降低工伤、违反合规的风险
时序、运动、安全的整合控制方案
・缩短新车型投产时工序变更引起的投产准备时间
・利用机器人缩短自动化投产准备时间
・全球范围内合理的安全管理和运行
・通过独立且分散的系统缩短工程链
・机器人系统连接的零验证
・不依赖现场专家的数字化安全管理

1、工序变更时通过硬线构建的安全系统的设计、验证、启动投产准备时间长
2、各机器人的连接验证需要大量时间
由于全球生产基地扩大,依靠现场专家来降低工伤、违反合规的风险
1、整合了时序、运动、安全的网络的独立分散系统让再利用变得更容易
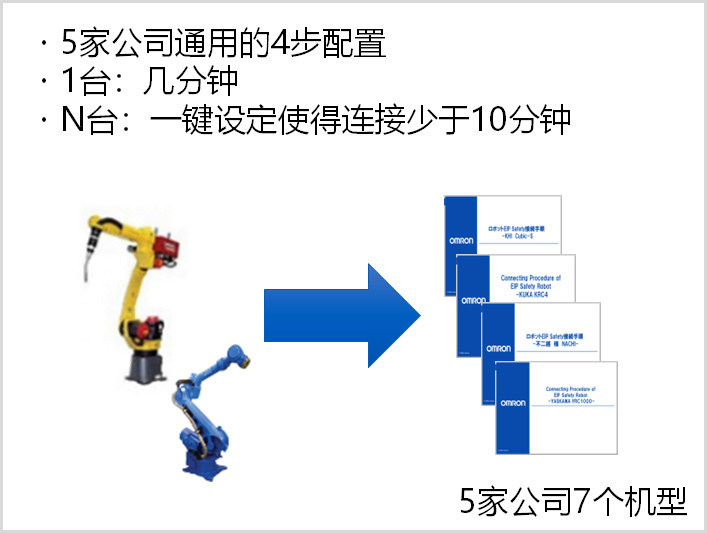
2、已完成CIP SAFETY对应的机器人连接验证,故连接零验证
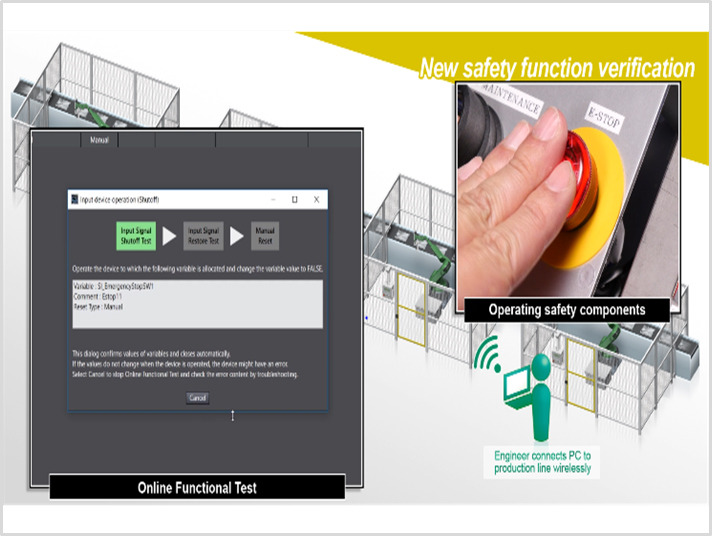
凭借向导方式的数字化安全管理,不再依赖现场专家,降低了工伤风险、违反合规的风险

由符合PLC Open的变量编程和基于CIP Safety组成的高自由度配置,以此实现工序模组化。现有生产线也更容易进行部分变更。

通过联合多家机器人制造商提供经过验证的通信零件,实现简单连接、启动。无需调整与工序特征、区域可采购性相符的机器人选型、机器人注册/设计/启动步骤
通过生成带安全签名的报告(证据),不需要专家也能实现可靠的安全管理、运行